Xueting Deng
邓雪婷, Ph.D. Candidate, Stony Brook University
Robotics Engineer | Mechanical Engineer Building intelligent mechanism systems with simulation, machine learning, and robotics
About
While AI has transformed the software world—from large language models to end-to-end robot control—an open question remains: can AI design the hardware itself? My research explores how generative models can assist in the design of real mechanical systems, including mechanisms composed of joints, links, and complex motions.
I am currently pursuing a Ph.D. in Mechanical Engineering at Stony Brook University, where I develop kinematic simulators, large-scale mechanism databases, and learning-based models for spatial linkage synthesis. In addition to my research on AI-aided mechanism design, I also work on robotic systems and dexterous hand design. You can learn more about my background in my CV and explore my projects below.
🔬 Research Interests: Robotics, Mechanism Design, Generative Models, Simulation, Dexterous Design and Manipulation, Deep Learning
Latest News
Conference Presentation
Conference Presentation
Presented my newest paper at ASME IDETC 2025
Ph.D Proposal Defense
Ph.D Proposal Defense
Defended my Ph.D proposal, one step closer to graduation!
Won ASME BPart Fellowship
Won ASME BPart Fellowship
Won the American Society of Mechanical Engineer's Broadening Participation Fellows Award, representing women and minorities in STEM
Conference Presentation
Conference Presentation
Presented two of my newest papers at ASME IDETC 2024
Check out my latest work
Unified Spatial Mechanism Kinematic Simulator
Unified Spatial Mechanism Kinematic Simulator
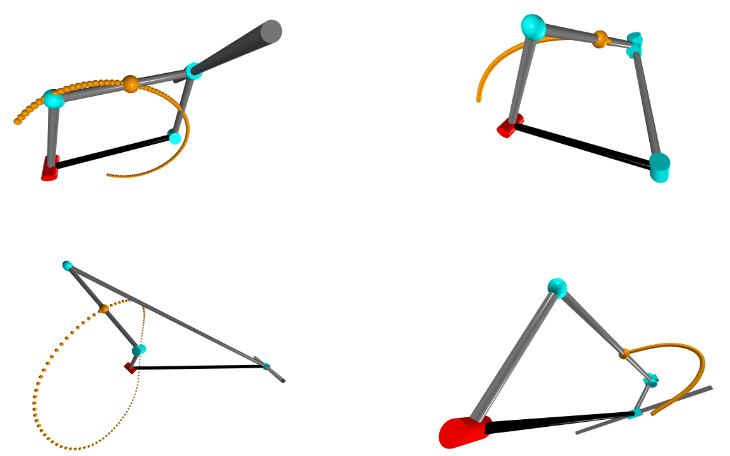
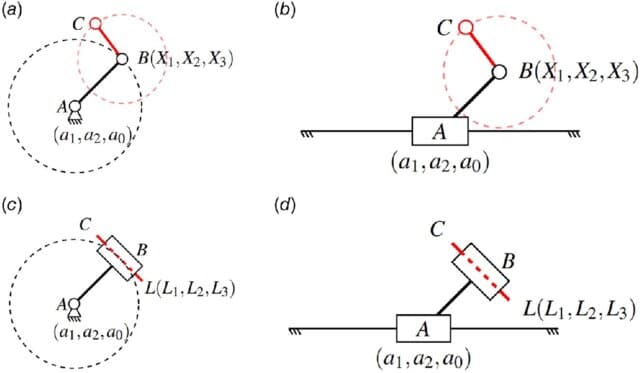
Developed a general-purpose kinematic simulator supporting multiple spatial joint types (R, P, C, U, W) for large-scale mechanism analysis and dataset generation.
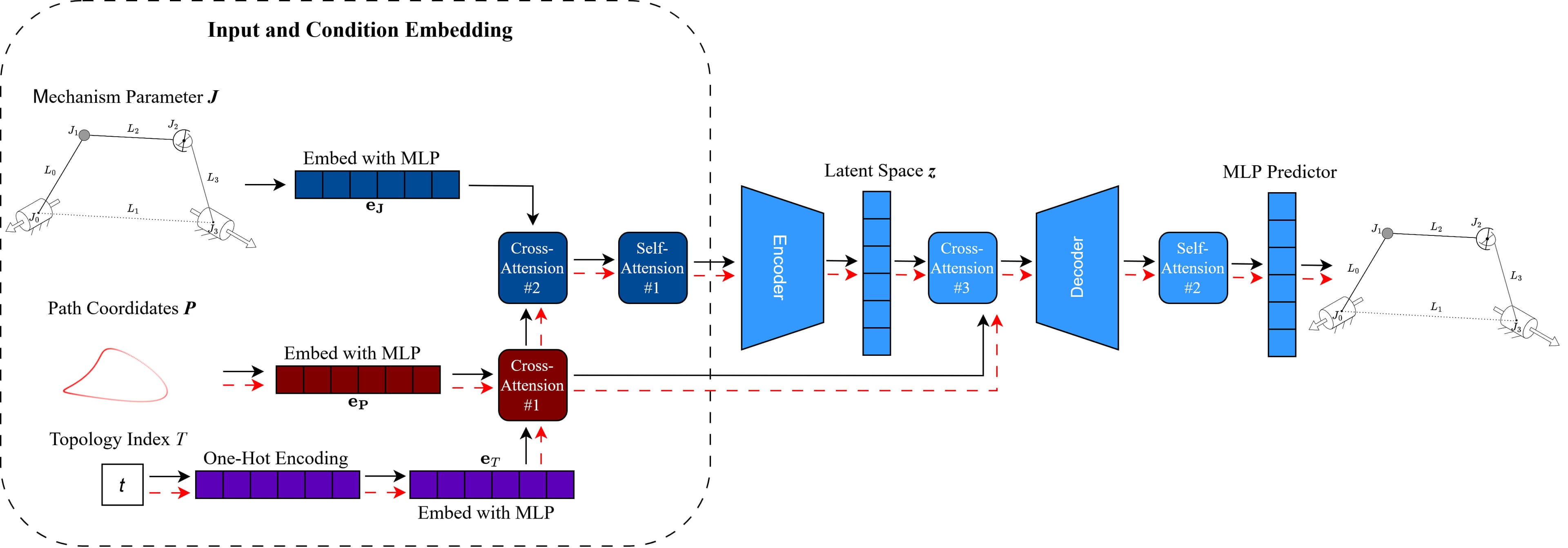
Deep Generative Model for Spatial Mechanism Path Synthesis
Deep Generative Model for Spatial Mechanism Path Synthesis
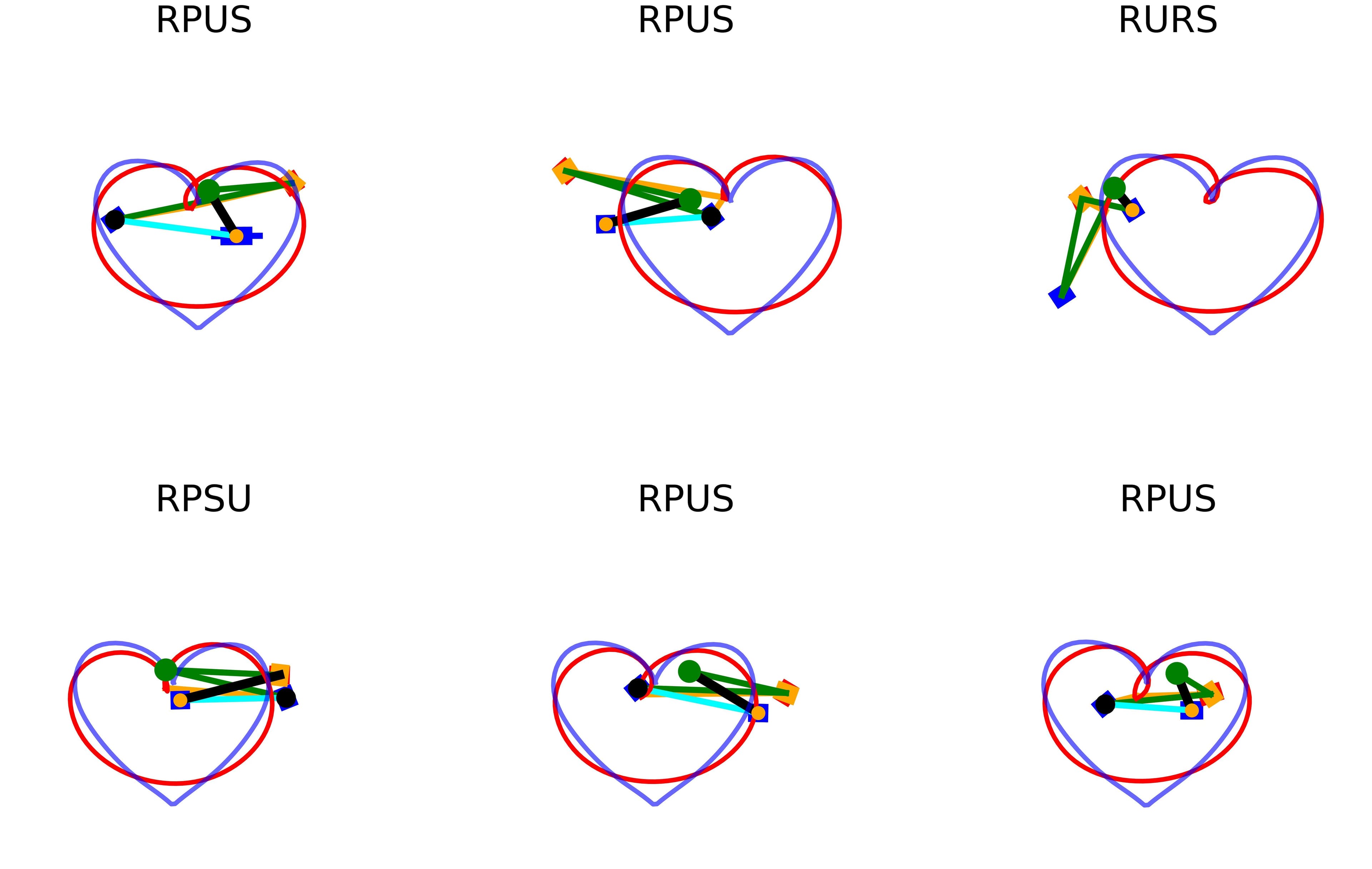
Built a conditional β-VAE model with attention mechanism, trained on millions of mechanism–path pairs to generate candidate spatial mechanisms for a desired coupler curve.
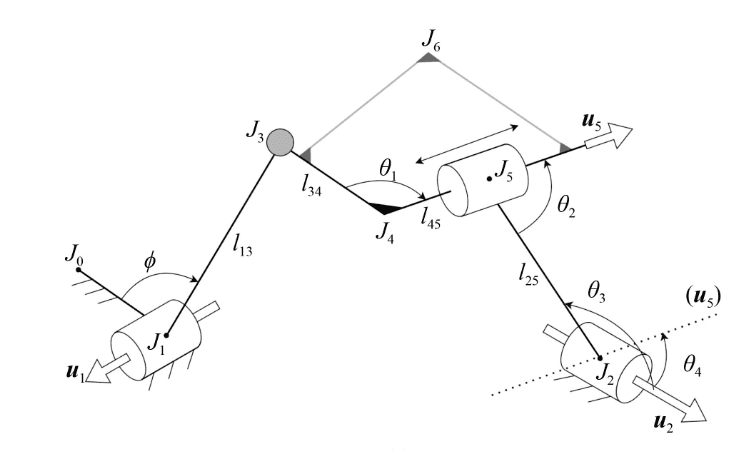
Path synthesis of spatial revolute-spherical-cylindrical-revolute mechanisms using deep learning
Path synthesis of spatial revolute-spherical-cylindrical-revolute mechanisms using deep learning
An optimizer that can train CTR prediction models with large batch (~128k)
Authors: Xueting Deng, Anar Nurizada, Anurag Purwar
A General Simulation Framework and Path Synthesis of Spatial Four-Bar Mechanisms Using Deep Generative Models
A General Simulation Framework and Path Synthesis of Spatial Four-Bar Mechanisms Using Deep Generative Models
An optimizer that can train CTR prediction models with large batch (~128k)
Authors: Xueting Deng, Anurag Purwar
A Matrix-based Approach to Unified Synthesis of Planar Four-Bar Mechanisms for Motion Generation with Position, Velocity, and Acceleration Constraints
A Matrix-based Approach to Unified Synthesis of Planar Four-Bar Mechanisms for Motion Generation with Position, Velocity, and Acceleration Constraints
An optimizer that can train CTR prediction models with large batch (~128k)
Authors: Xueting Deng, Anurag Purwar
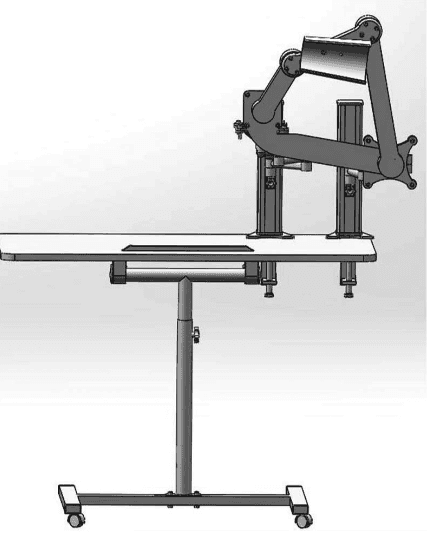
Design of a Single-Degree-of-Freedom Immersive Rehabilitation Device for Clustered Upper-Limb Motion
Design of a Single-Degree-of-Freedom Immersive Rehabilitation Device for Clustered Upper-Limb Motion
An optimizer that can train CTR prediction models with large batch (~128k)
Authors: Ping Zhao, Yating Zhang, Haiwei Guan, Xueting Deng, Haodong Chen
Data-driven design of a six-bar lower-limb rehabilitation mechanism based on gait trajectory prediction
Data-driven design of a six-bar lower-limb rehabilitation mechanism based on gait trajectory prediction
An optimizer that can train CTR prediction models with large batch (~128k)
Authors: Wanbing Song, Ping Zhao, Xiangyun Li, Xueting Deng, Bin Zi
Design and Optimization of a Multi-mode Single-DOF Watt-I Six-Bar Mechanism with One Adjustable Parameter
Design and Optimization of a Multi-mode Single-DOF Watt-I Six-Bar Mechanism with One Adjustable Parameter
An optimizer that can train CTR prediction models with large batch (~128k)
Authors: Yating Zhang, Xueting Deng, Bin Zhou, Ping Zhao
Skills
Awards & Honors
Broadening Participation Fellows Award, American Society of Mechanical Engineer
Outstanding Undergraduate, Hefei University of Technology
Academic Services
Mechtronics | Engineering Dynamics | Mechanics of Solids | Numerical Methods in Engineering Design and Analysis | Engineering Computing and Problem Solving | Freshman Design Innovation |
Invited Talks
ASME IDETC
ASME IDETC
A General Simulation Framework and Path Synthesis of Spatial Four-Bar Mechanisms Using Deep Generative Models
ASME IDETC
ASME IDETC
Synthesizing Spatial RSCR Mechanisms for Path Generation Using a Deep Neural Network
ASME IDETC
ASME IDETC
A Matrix-Based Approach to Unified Synthesis of Planar Four-Bar Mechanisms for Motion Generation With Position, Velocity, and Acceleration Constraints
ASME IDETC
ASME IDETC
A Unified Design Equation to Represent Geometric Constraints of Spatial SS, ES and SE Dyads
Get in Touch
Want to chat? Feel free to reach out via email →
- • Ask questions
- • Explore collaboration opportunities